12 KiB
Chacon IPCAM-RI01

Camera này là một phiên bản đổi thương hiệu của một công ty sản xuất được xác định bởi "PPStrong". Tôi chắc chắn rằng có những camera khác ngoài kia đang sử dụng cùng một phần cứng (hoặc tương tự với những thay đổi nhỏ).
Phần cứng
| Hệ thống | Mô tả |
|---|---|
| SoC | HI3518EV300 |
| Cảm biến | JXF23 |
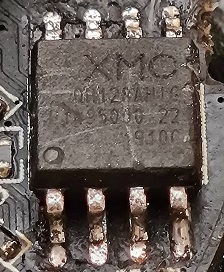
| Flash | 16Mb (XM25QH128A) hoặc 8Mb (XM25QH64A) |
| WiFi | RTL8188FU |
Trạng thái OpenIPC
| Thành phần | Trạng thái |
|---|---|
| WiFi | Hoạt động |
| Động cơ | Hoạt động (trình điều khiển được vá) |
| Đèn LED đỏ/xanh | Hoạt động |
| Đèn LED IR | Hoạt động |
| Cắt IR | Hoạt động |
Chi tiết phần cứng
Bo mạch chủ của camera được xác định bởi "SPEED5S-H1MB_F23".
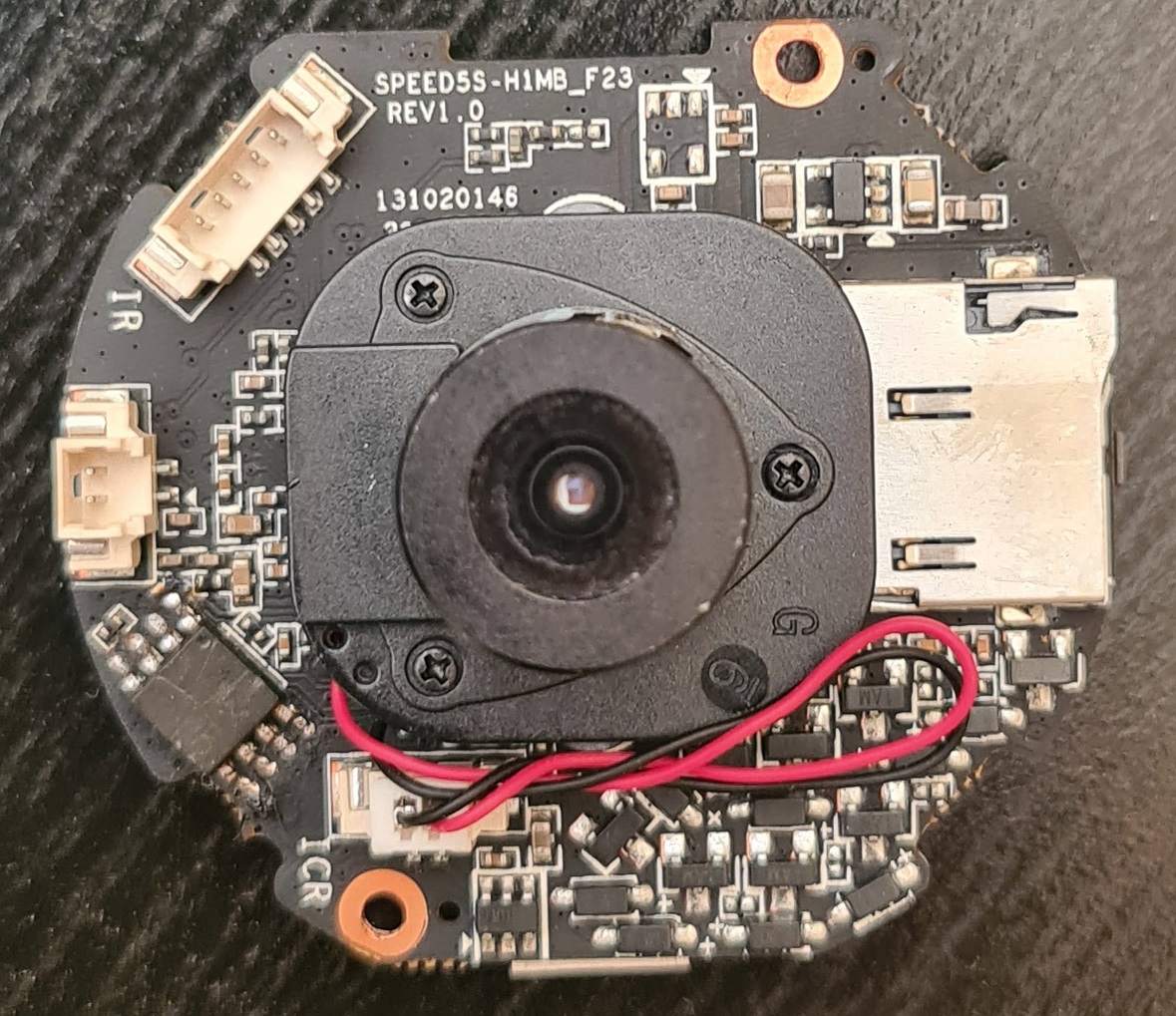 Ở phía trên của bo mạch chủ:
Ở phía trên của bo mạch chủ:
- một khe cắm thẻ nhớ microSD ở bên phải
- đầu nối có nhãn "IR" cấp nguồn cho đèn LED IR, đèn LED đỏ và đèn LED xanh lam
- đầu nối "ICR" cấp nguồn cho bộ lọc cắt IR
- đầu nối không được xác định là đầu vào cho micrô
- chip flash SPI NOR (QH128A)
 Ở phía dưới của bo mạch chủ:
Ở phía dưới của bo mạch chủ:
- SoC Hi3518EV300
- Mô-đun WiFi RTL8188FTV
- Nút Reset
- Đầu nối (từ trên xuống dưới):
- Nguồn (5V từ đầu nối micro USB)
- Động cơ bước nghiêng/dọc
- Động cơ bước xoay/ngang
- Loa
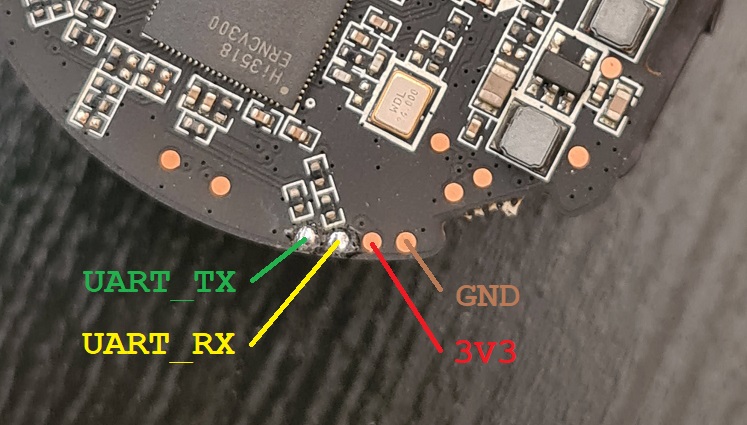
- Chân UART ở phía dưới bên trái
SoC
- ARM Cortex-A7@ 900 MHz
- 64Mb DDR2

Wifi
- 802.11b/g/n 2.4G
- Giao diện USB

Flash SPI NOR
- 16Mb SPI NOR Flash
Chân UART (cổng serial)
GPIO
| số | Mô tả |
|---|---|
| 0x0f (15) | irCut_1 |
| 0x0c (12) | irCut_2 |
| 0x28 (40) | Đèn LED IR |
| 0x33 (51) | Đèn LED đỏ |
| 0x32 (50) | Đèn LED xanh |
| 0x0d (13) | Nguồn WLAN |
| 0x00 (0) | AcShdn |
| 0x09 (9) | Nút Reset |
| 0x3b (59) | Động cơ Nghiêng A1 |
| 0x3a (58) | Động cơ Nghiêng A2 |
| 0x39 (57) | Động cơ Nghiêng B1 |
| 0x38 (56) | Động cơ Nghiêng B2 |
| 0x47 (71) | Động cơ Xoay A1 |
| 0x45 (69) | Động cơ Xoay A2 |
| 0x46 (70) | Động cơ Xoay B1 |
| 0x44 (68) | Động cơ Xoay B2 |
Sửa đổi
Cổng Serial USB
Có một đầu nối micro USB để cấp nguồn cho camera và với một số thao tác hàn, đầu nối này cũng có thể được sử dụng cho bộ chuyển đổi serial sang USB. Nếu bạn thấy khó hàn dây trên đầu nối micro USB của camera, hãy mua một bảng breakout micro USB.
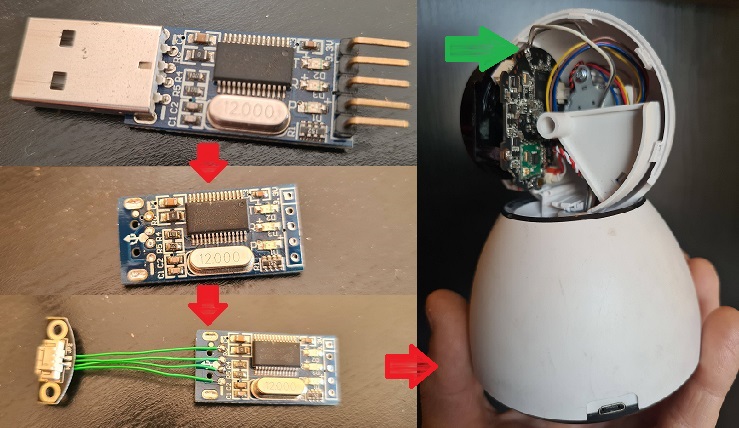
- Lấy một bộ chuyển đổi 3.3V TTL sang USB (sử dụng một bộ chuyển đổi pl2303hx rẻ tiền)
- Tháo đầu nối và chân USB-A
- Kết nối cổng micro USB của camera với bộ chuyển đổi
- Kết nối UART của camera với bộ chuyển đổi
Firmware gốc
Camera uBoot được bảo vệ bằng mật khẩu là "pps_password".
Tạo bản sao lưu
Để sao lưu firmware gốc, bạn cần một bộ chuyển đổi serial USB được kết nối với bảng mạch và một thẻ nhớ SD.
Tìm ra kích thước chip flash của bạn:
pps # getinfo spi
Block:64KB Chip:8MB*1
D:0x20 0x70 0x17
Name:"XM25QH64AHIG"
Lệnh uBoot để sao lưu toàn bộ bộ nhớ flash trên thẻ nhớ SD (tất cả nội dung của thẻ nhớ SD sẽ bị mất). Tùy thuộc vào kích thước bộ nhớ flash của camera, hãy thay thế <kích thước1>/<kích thước2> bằng:
- 0x800000/0x4000 cho flash 8MB
- 0x1000000/0x8000 cho flash 16Mb (kích thước2 = kích thước1 / 512)
sf probe
sf read 0x40000000 0 <kích thước1>
mmc write 0 0x40000000 0 <kích thước2>
Ví dụ đầu ra (flash 8Mb):
pps # sf probe
pps # sf read 0x40000000 0 0x800000
device 0 whole chip
SF: 8388608 bytes @ 0x0 Read: OK
pps # mmc write 0 0x40000000 0 0x4000
had init
MMC write: dev # 0, block # 0, count 16384 ... had init
16384 blocks written: OK
pps #
Thao tác này sẽ ghi toàn bộ flash vào thẻ mmc ở "chế độ thô" (không có hệ thống tệp).
CẢNH BÁO: nếu bạn để thẻ trong camera và camera khởi động FW gốc, thẻ sẽ bị định dạng và bản sao lưu sẽ bị mất!
Sau đó, để lưu bản dump vào một tệp, hãy lắp thẻ vào hệ thống đang chạy Linux và:
dd if=/dev/mmcblk0 of=./flash_backup.bin bs=512 count=<kích thước2>
cat /proc/mtd
Phiên bản flash 8Mb
dev: size erasesize name
mtd0: 00030000 00010000 "bld" 196608 0
mtd1: 00010000 00010000 "env" 65536 196608
mtd2: 00010000 00010000 "enc" 65536 262144
mtd3: 00010000 00010000 "sysflg" 65536 327680
mtd4: 00310000 00010000 "sys" 3211264 393216
mtd5: 00420000 00010000 "app" 4325376 3604480
mtd6: 00070000 00010000 "cfg" 458752 7929856 - 8388608
Phiên bản flash 16Mb
dev: size erasesize name
mtd0: 00060000 00010000 "bld" 393216 0
mtd1: 00010000 00010000 "env" 65536 393216
mtd2: 00010000 00010000 "enc" 65536 458752
mtd3: 00010000 00010000 "sysflg" 65536 524288
mtd4: 00380000 00010000 "sys" 3670016 589824
mtd5: 00680000 00010000 "app" 6815744 4259840
mtd6: 00180000 00010000 "cfg" 1572864 11075584
mtd7: 00100000 00010000 "recove" 1048576 12648448
mtd8: 002d0000 00010000 "user" 2949120 13697024
mtd9: 00020000 00010000 "oeminfo" 131072 16646144 - 16777216
dmesg
(quá dài để dịch, nếu bạn cần phần này được dịch, vui lòng cho tôi biết)
Khởi động telnetd
FW gốc của camera chạy một máy chủ REST với xác thực (tên người dùng: PpStRoNg, mật khẩu: #%&wL1@*tU123zv).
Một trong những tính năng thú vị nhất là chức năng "runcmd" (thay thế <your_cam_ip> bằng địa chỉ IP camera của bạn):
Gửi yêu cầu (lưu ý \ thoát khỏi & cho mật khẩu):
curl -u PpStRoNg:#%\&wL1@*tU123zv -i http://<your_cam_ip>:80/devices/runcmd --request POST --data '{"cmd":"ls"}'
HTTP/1.1 200 OK
Content-Type: application/json
Content-Length: 0
Nhận đầu ra (định dạng json):
curl -u PpStRoNg:#%\&wL1@*tU123zv -i http://<your_cam_ip>:80/devices/runcmd
HTTP/1.1 200 OK
Content-Type: application/json
Content-Length: 129
{
"value": "usr\nsys\netc\nmnt\nlib\nproc\nboot\nopt\nlinuxrc\nbin\ndev\ninit\nhome\nsbin\nnfsroot\nroot\ntmp\nvar\ndevinfo\n"
}
Trong FW mới nhất, họ đã xóa tệp nhị phân "telnetd", vì vậy bạn cần đặt nó trên thẻ nhớ SD: telnetd.zip
Để khởi động máy chủ, hãy sao chép tệp nhị phân telnetd vào thẻ nhớ SD và chạy:
curl -u PpStRoNg:#%\&wL1@*tU123zv -i http://<your_cam_ip>:80/devices/runcmd --request POST --data '{"cmd":"echo 'anyone::0:0:root:/:/bin/sh' >> /etc/passwd"}'
curl -u PpStRoNg:#%\&wL1@*tU123zv -i http://<your_cam_ip>:80/devices/runcmd --request POST --data '{"cmd":"/mnt/mmc01/telnetd &"}'
Tại thời điểm này, bạn sẽ có thể telnet vào camera:
$ telnet <your_cam_ip>
Trying <your_cam_ip>...
Connected to <your_cam_ip>.
Escape character is '^]'.
(none) login: anyone
BusyBox v1.26.2 (2019-04-16 05:35:27 PDT) built-in shell (ash)
/ #
Đầu ra của ipctool (flash 8Mb):
/mnt/mmc01 # ./ipctool
---
chip:
vendor: HiSilicon
model: 3518EV300
id: 022c40074e0038f1ee70030a0d73b5d32549ab0c81a025e3
mdio busy
mdio busy
ethernet:
mac: "c4:3a:35:75:bf:71"
u-mdio-phyaddr: 0
phy-id: 0x00000000
d-mdio-phyaddr: 0
rom:
- type: nor
block: 64K
partitions:
- name: sys
size: 0x310000
sha1: c890f4a1
- name: app
size: 0x420000
sha1: 32c12243
- name: cfg
size: 0x70000
path: /home/cfg,jffs2,rw
size: 7M
addr-mode: 3-byte
ram:
total: 64M
media: 27M
firmware:
kernel: "4.9.37 (Mon Jul 22 00:51:54 PDT 2019)"
libc: uClibc 0.9.33.2
sdk: "Hi3516EV200_MPP_V1.0.1.0 B050 Release (May 9 2019, 22:51:50)"
main-app: ./ppsapp
sensors:
- vendor: Silicon Optronics
model: JXF23
control:
bus: 0
type: i2c
addr: 0x80
data:
type: MIPI
input-data-type: DATA_TYPE_RAW_10BIT
lane-id:
- 0
- 1
image: 1920x1080
clock: 27MHz
/mnt/mmc01 #
Firmware OpenIPC
Flash OpenIPC
(sắp ra mắt...)
Dump khởi động
(quá dài để dịch, nếu bạn cần phần này được dịch, vui lòng cho tôi biết)
(sắp ra mắt...)
rtl8188fu
(sắp ra mắt...)
Trình điều khiển động cơ
Camera có 2 động cơ bước để điều khiển nghiêng (lên/xuống) và xoay (trái/phải).
Thay thế trình điều khiển động cơ tại /lib/modules/4.9.37/hisilicon/camhi-motor.ko bằng trình điều khiển được bao gồm bên dưới.
Tệp .zip cũng bao gồm bản dựng được sửa đổi một chút của mã điều khiển mẫu mà bạn có thể sao chép vào /bin.
Cách sử dụng:
motor_ctrl -d u # di chuyển/nghiêng lên (theo mặc định là 20 bước)
motor_ctrl -d d # di chuyển/nghiêng xuống
motor_ctrl -d l # di chuyển/xoay sang trái
motor_ctrl -d r -s 50 # di chuyển/xoay sang phải 50 bước
Cấu hình cảm biến/chân Majestic
image:
mirror: true
flip: true
(...)
nightMode:
irCutPin1: 15
irCutPin2: 12
backlightPin: 40
Đèn LED
Camera có đèn LED hai màu (đỏ/xanh lam) được kết nối với GPIO 50 và 51. Để điều khiển các đèn LED đó, bạn có thể sử dụng API /sys:
# làm cho GPIO có thể truy cập được
echo 50 > /sys/class/gpio/export
# và đặt hướng (chỉ cần thực hiện một lần)
echo out > /sys/class/gpio50/direction
echo out > /sys/class/gpio51/direction
# bật đèn LED xanh lam
echo 1 > /sys/class/gpio50/value
# tắt đèn LED xanh lam
echo 0 > /sys/class/gpio50/value
# bật đèn LED đỏ
echo 1 > /sys/class/gpio51/value
# tắt đèn LED đỏ
echo 0 > /sys/class/gpio51/value